 Gaussian Fisher matrix#
Gaussian Fisher matrix#
This section shows how to compute a Gaussian Fisher matrix for models with a parameter-dependent mean and, optionally, a parameter-dependent covariance.
The Gaussian Fisher generalizes the standard Fisher matrix by including contributions from derivatives of the covariance matrix when \(C(\theta)\) depends on the model parameters.
For a model with mean prediction \(\mu(\theta)\) and covariance \(C(\theta)\), the Fisher matrix is
If the covariance is independent of the parameters, the second term vanishes and the expression reduces to the standard Fisher matrix.
The primary interface for this workflow is
derivkit.forecast_kit.ForecastKit.
For conceptual background and interpretation, see
ForecastKit.
The Gaussian Fisher is useful when noise properties, systematics, or model uncertainties depend explicitly on the parameters being forecast.
A mock example#
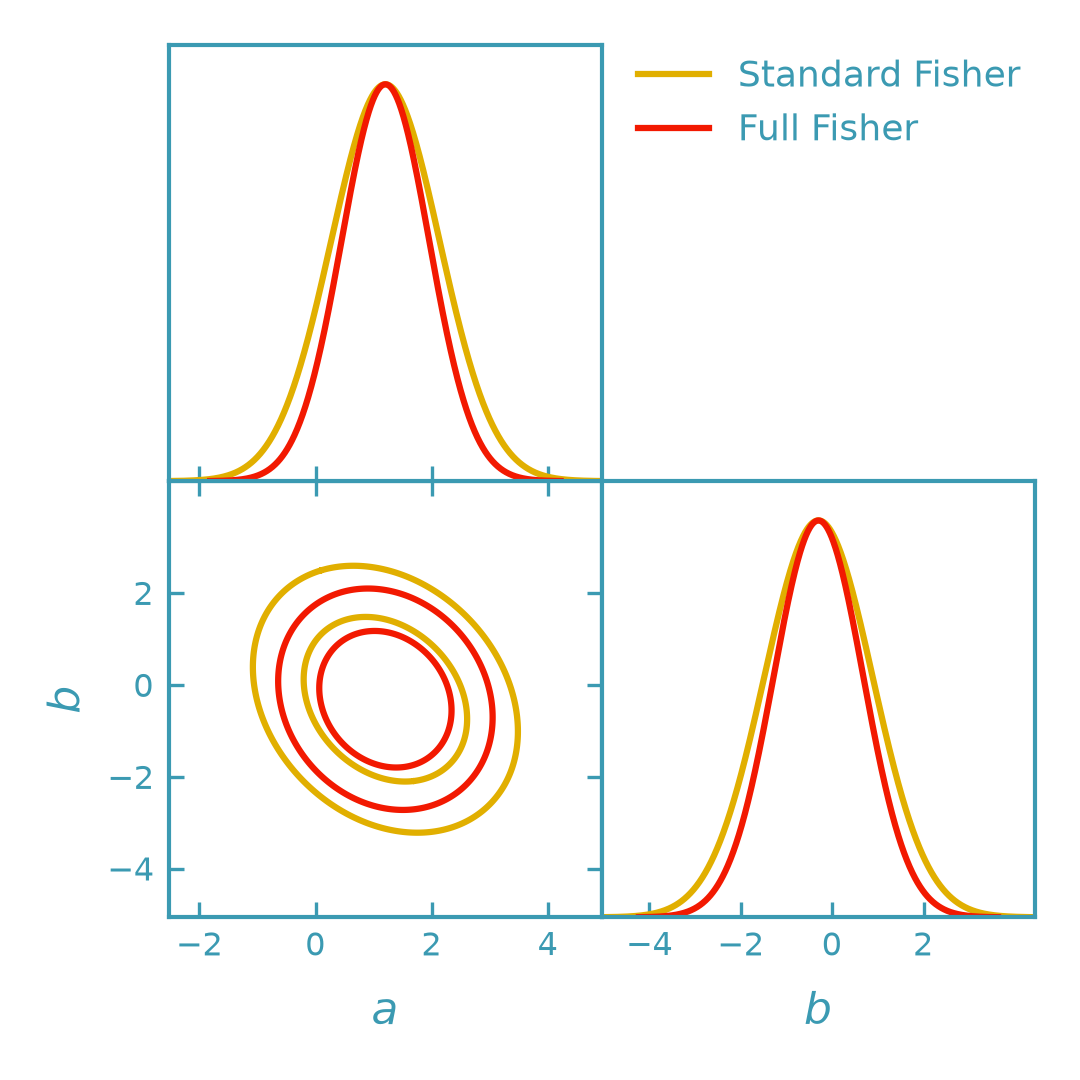
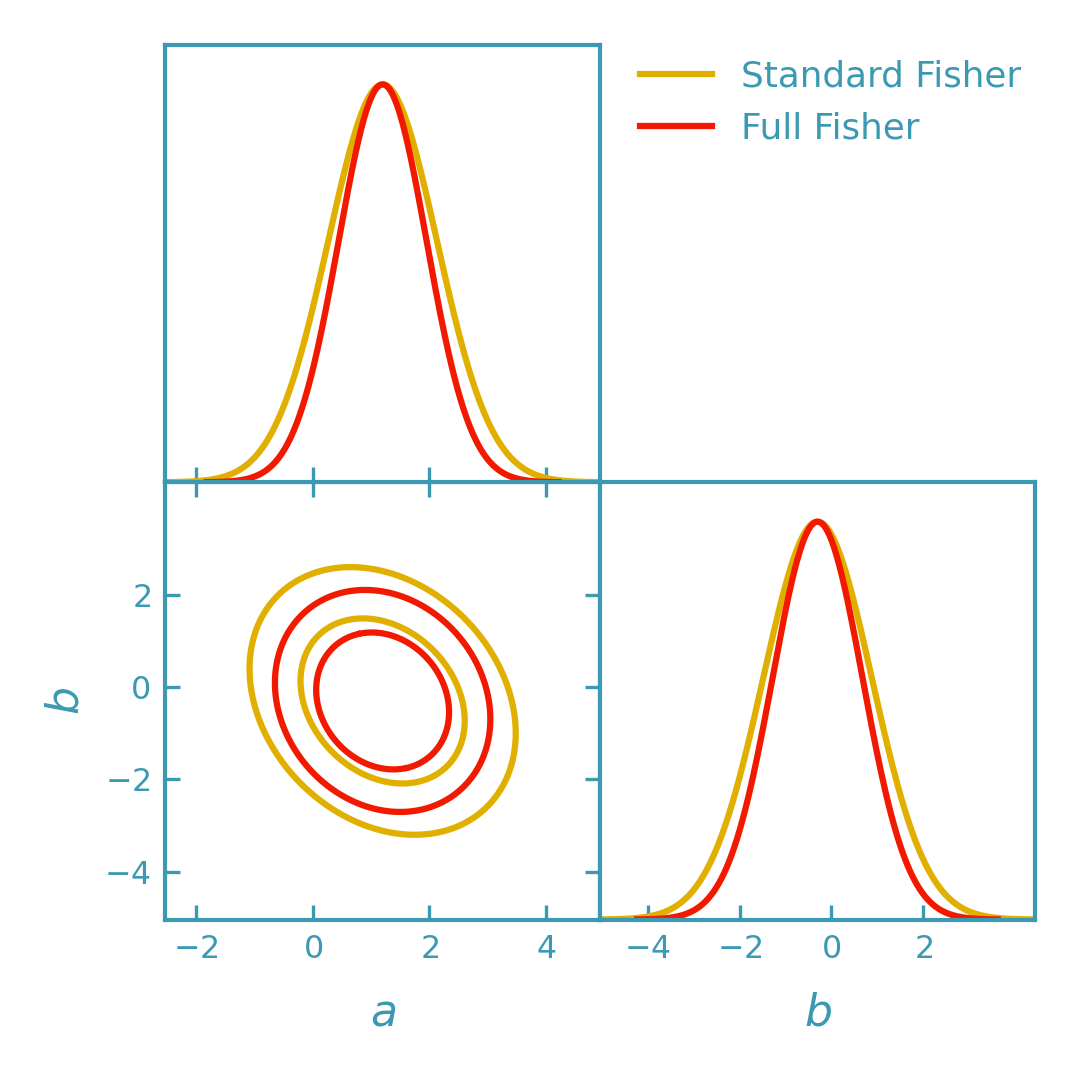
This example compares:
Standard Fisher: uses a fixed covariance \(C(\theta_0)\) and computes \(F = J^\mathsf{T} C^{-1} J\).
Full Gaussian Fisher: allows \(C(\theta)\) and adds the corresponding covariance-derivative terms to the Fisher matrix.
The covariance dependence is chosen to be noticeable but not dominant, while remaining symmetric positive definite (SPD) by construction, ensuring a valid and invertible covariance matrix.
>>> import numpy as np
>>> from getdist import plots as getdist_plots
>>> from derivkit import ForecastKit
>>> # Toy model: data vector in R^3, parameters in R^2
>>> def model(theta):
... a, b = theta
... return np.array([a + 0.5 * b, 0.4 * a * b, 0.8 * a + 0.3 * b], dtype=float)
>>> # Parameter-dependent covariance
>>> # C(theta) = C_base + alpha * S(theta) S(theta)^T.
>>> def cov_fn(theta):
... a, b = theta
... c_base = np.array(
... [
... [0.30, 0.03, 0.01],
... [0.03, 0.26, 0.02],
... [0.01, 0.02, 0.22],
... ],
... dtype=float,
... )
... s = np.array(
... [
... [1.0 + 0.9 * a, 0.7 * b, 0.15 * a],
... [0.25 * b, 0.9 + 0.8 * b, 0.35 * a],
... [0.10 * a, 0.45 * b, 0.8 + 1.0 * a],
... ],
... dtype=float,
... )
... alpha = 0.25
... return c_base + alpha * (s @ s.T)
>>> # Fiducial parameters
>>> theta0 = np.array([1.2, -0.3])
>>> # Build ForecastKit and compute both Fisher matrices
>>> fk = ForecastKit(function=model, theta0=theta0, cov=cov_fn)
>>> fisher_std = fk.fisher()
>>> fisher_full = fk.gaussian_fisher()
>>> # Convert to GetDist GaussianND samples for visualization
>>> gnd_std = fk.getdist_fisher_gaussian(
... fisher=fisher_std,
... names=["a", "b"],
... labels=[r"a", r"b"],
... label="Standard Fisher",
... )
>>> gnd_full = fk.getdist_fisher_gaussian(
... fisher=fisher_full,
... names=["a", "b"],
... labels=[r"a", r"b"],
... label="Full Gaussian Fisher",
... )
>>> (gnd_std is not None) and (gnd_full is not None)
True
>>> # Plot the results
>>> dk_yellow = "#e1af00"
>>> dk_red = "#f21901"
>>> line_width = 1.5
>>> plotter = getdist_plots.get_subplot_plotter(width_inch=3.6)
>>> plotter.settings.linewidth_contour = line_width
>>> plotter.settings.linewidth = line_width
>>> plotter.settings.figure_legend_frame = False
>>> plotter.triangle_plot(
... [gnd_std, gnd_full],
... params=["a", "b"],
... legend_labels=["Standard Fisher", "Full Fisher"],
... legend_ncol=1,
... filled=[False, False],
... contour_colors=[dk_yellow, dk_red],
... contour_lws=[line_width, line_width],
... contour_ls=["-", "-"],
... )
(png)
{kind=link}
Notes#
ForecastKit.fisher()uses a fixed covariance \(C(\theta_0)\) and computes only the mean-derivative term.ForecastKit.gaussian_fisher()includes the additional covariance-derivative contribution when a parameter-dependent covariance \(C(\theta)\) is provided.